Свиђало нам се то или не, окружени смо роботима. Хиљаде Американаца вози се на посао ових дана у аутомобилима који се прилично возе. Усисивачи самостално прегледавају наше дневне собе. Куадцоптер дронови аутоматски затварају поља на фарми, узимајући ваздушне снимке који помажу пољопривредницима да узгајају своје усјеве. Чак и хуманоидни роботи који изгледају застрашујуће, они који могу да скачу и трче као ми, могу бити комерцијално доступни у блиској будућности.
Роботски уређаји постају прилично добри у кретању по нашем свету без икакве интервенције од нас. Али упркос овим новонасталим вештинама, они и даље имају велику слабост: Најталентованији гомила и даље може да се заустави на својим траговима једноставном кључем.
Питање, каже Матт Масон, роботичар са Универзитета Царнегие Меллон, је да због свих постојећих способности робота да се самостално крећу свијетом, они још увијек не могу физички утјецати на објекте на значајан начин након што стигну тамо.
„Шта смо научили од роботике? Поука број један је да је манипулација тешка. То је супротно нашем индивидуалном искуству, јер је готово сваки човек вешт манипулатор ”, пише Масон у недавном чланку о прегледу.
То је фер поанта. Ми људи манипулирамо светом око нас без размишљања. Предмете несметано хватамо, лупкамо, прережемо, сечемо и продиркујемо, захваљујући делом нашим невероватно спретним рукама. Као резултат тога, ми смо изградили наше светове с тим додацима на уму. Сви мобилни телефони, тастатуре, радио и остали алати којима смо се руковали током целог живота дизајнирани су изричито да се уклапају у прсте и дланове.
Није тако за постојеће роботе. У овом тренутку, један од најчешће коришћених роботских ручних дизајна, назван „хватаљка“, мање је више идентичан онима које су на телевизији замислили 1960-их: уређај направљен од два укочена метална прста који шчепају предмете између њих.
У контролисаном окружењу попут монтажне линије, уређаји попут ових раде сасвим у реду. Ако робот зна да ће сваки пут када посегне за одређеним делом бити на истом месту и оријентацији, тада је хватање тривијално. „Јасно је какав део ће се спустити по покретној траци, што ротирање и перцепцију релативно лако чини“, примећује Јеаннетте Бохг, роботичарка са Универзитета Станфорд.
Реални свет је, с друге стране, неуредан и пун непознаница. Замислите само своју кухињу: Могуће је да се поред судопера може сушити гомила посуђа, меко и крхко поврће које стоји у фрижидеру и више посуђа угураних у уске фиоке. Из перспективе робота, каже Бохг, идентификација и манипулација тим огромним низом објеката био би крајњи хаос.
„Ово је на неки начин свети грал, зар не? Веома често желите да манипулишете широким спектром објеката којима људи најчешће манипулишу и да су начињени да њима манипулишу људи “, каже Матеи Циоцарлие, истраживач роботике и машински инжењер са Универзитета Цолумбиа. „Можемо изградити манипулаторе за одређене објекте у специфичним ситуацијама. То није проблем. Свестраност је у томе тешкоћа. "
Да бисте се носили са огромним бројем јединствених облика и физичких својстава тих материјала - било да су чврсти попут ножа или су деформабилни, попут комада пластичне овојнице - идеални роботски додатак нужно би био нешто што подсећа на оно што је крај наше руке. Чак и са чврстим костима, наше се руке савијају и савијају док хватамо предмете, тако да ако рука робота може учинити исто, могла би да „кавезује“ предмете унутар свог захвата и помера их по површини, грабећи их као дојенче. њене играчке.
Инжењеринг те свестраности није мали подвиг. Када су инжењери у иРобот-у - истој компанији која вам је донела усисавач Роомба - развили флексибилну, троредну „руку“ пре неколико година, то је оцијењено као главни подвиг. Данас се роботичари и даље окрећу од верне реплике људске руке, гледајући ка лепршавим материјалима и бољим рачунским алатима попут машинског учења како би их контролисали.
Потрага за меким, флексибилним "рукама"
"Хватачи слични човеку имају тенденцију да буду много осјетљивији и скупљи, јер имате пуно више мотора и они се спакују у мали простор", каже Дмитриј Беренсон, који проучава аутономне роботске манипулације на Универзитету у Мичигену. "Заиста, морате имати много инжењеринга да бисте радили и обично пуно одржавања." Због тих ограничења, индустрија каже да постојеће људске руке не користе широко.
Да би роботска рука била практична и чак се приближила људским способностима, морала би бити чврста, али флексибилна; бити у стању осјетити хладноћу, топлину и додир уз високе резолуције; и бити довољно њежан да покупи крхке предмете, али довољно чврст, да издржи батине. Ох, и поврх свега тога, то би морало бити јефтино.
Да би решили овај проблем, неки истраживачи желе да створе сретан медиј. Они тестирају руке које опонашају неке од наших особина, али далеко су једноставније за дизајн и изградњу. Свака користи мекане "прсте" из латекса покретани кабловима налик на тетиву који их повлаче и отварају. Предност ових врста дизајна је њихова буквална флексибилност - када наиђу на предмет, могу га прешишати, обликовати у његов сложен облик и уредно га истргнути.
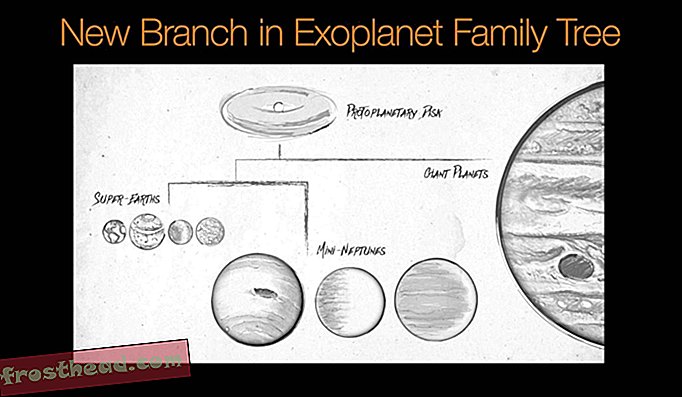
 Уместо руку које подсећају на наше, неки истраживачи раде на меким, флексибилним направљеним од силикона. На овој слици шупљи силиконски прсти се вијугају док су испуњени ваздухом, стежући их око необично обликованих предмета. (Ј. МОРРОВ ЕТ АЛ / ИЕЕЕ ИНТЕРНАТИОНАЛ ЦОНФЕРЕНЦЕ ОФ РОБОТИЦС АНД АУТОМАТИОН (ИЦРА) 2016)
Уместо руку које подсећају на наше, неки истраживачи раде на меким, флексибилним направљеним од силикона. На овој слици шупљи силиконски прсти се вијугају док су испуњени ваздухом, стежући их око необично обликованих предмета. (Ј. МОРРОВ ЕТ АЛ / ИЕЕЕ ИНТЕРНАТИОНАЛ ЦОНФЕРЕНЦЕ ОФ РОБОТИЦС АНД АУТОМАТИОН (ИЦРА) 2016) Такве шиљасте „руке“ нуде велико побољшање у односу на држач од тврдог метала. Али они тек почињу да решавају то питање. Иако гумени прст одлично функционира за прикупљање свих врста предмета, борит ће се с финим моторичким способностима потребним за једноставне задатке попут стављања новчића у утор - који укључује не само држање новчића, већ и осјећање утора, избјегавање његових ивица, и клизање новчића унутра. Из тог разлога, каже Циоцарлие, стварање сензора који роботима говоре више о објектима које додирују једнако је важан део слагалице.
Наши врхови прстију имају на хиљаде појединачних рецептора додира уграђених у кожу. "Ми стварно не знамо како да направимо такве врсте сензора, а чак и да јесмо, имали бисмо јако тешко да их повежемо и извучемо те податке", каже Циоцарлие.
Чист број потребних сензора створио би друго, још чвршће питање: шта учинити са свим тим информацијама када их имате. Беренсон почиње да се појављују рачунске методе које омогућавају роботу да користи огромне количине сензорних података за планирање свог следећег потеза. Али, достизање тих способности тамо где треба да буде, можда ће надокнадити све друге изазове са којима се истраживачи суочавају у постизању аутономне манипулације. Изградња робота који може да користи своје „руке“ брзо и неприметно - чак и у потпуно новим ситуацијама - можда неће бити могућа ако инжењери не могу да му дају облик сложене интелигенције.
Та моћ мозга је нешто што многи од нас људи узимају здраво за готово. Да покупимо оловку на нашем столу, једноставно пружимо руку и зграбимо је. Кад једемо вечеру, користимо крпе, виљушке и штапиће за храњење наше хране са милошћу и прецизношћу. Чак и ампутирани који су изгубили горње удове могу научити користити протетске куке за задатке који захтевају фине моторичке способности.
„Они могу да вежу ципеле, могу да направе сендвич, могу се обући - и то све најједноставнијим механизмом. Тако да знамо да је могуће ако иза себе имате праву интелигенцију “, каже Беренсон.
Подучавање машине
Долазак до тог нивоа интелигенције у роботу може захтевати скок у тренутним методама које истраживачи користе како би их контролисали, каже Бохг. Донедавно је већина софтвера за манипулацију укључивала израду детаљних математичких модела реалних ситуација, а затим је робота пустила да користи те моделе да планирају своје кретање. Један недавно изграђени робот са задатком да састави Икеа столицу, на пример, користи софтверски модел који може да препозна сваки појединачни комад, разуме како се уклапа заједно са комшијама и упоређује га са оним што изгледа коначни производ. Посао монтаже може да заврши за око 20 минута. Замолите га да састави другачији Икеа производ, и он ће бити потпуно препун.
Људи различито развијају вештине. Уместо да имамо дубоко знање о једној уској теми, апсорбујемо знање у лету из примера и праксе, појачавајући покушаје који делују и одбацујући оне који то не чине. Присјетите се првог пута када сте научили насјецкати лук - након што сте неколико пута смислили како да држите нож и кришку, вјероватно нисте морали да кренете од нуле када сте наишли на кромпир. Па како неко може добити робота да то уради?
Бохг мисли да се одговор можда крије у „машинском учењу“, својеврсном итеративном процесу који омогућава роботу да разуме који су покушаји манипулације успешни а који нису - и омогућава му да користи те информације за маневрисање у ситуацијама са којима се никада није сусрео.
"Пре него што је машинско учење ушло у област роботике, било је све о моделирању физике манипулације - смисливши математичке описе предмета и његове околине", каже она. „Машинско учење омогућава нам да роботу пружимо гомилу примера предмета које је неко напоменуо, показујући то:„ Овде је добро место за хватање. ““ Робот би могао да користи ове прошле податке да погледа потпуно нови предмет и да разуме како схвати то.
Ова метода представља велику промјену у односу на претходне технике моделирања, али можда ће проћи неко вријеме прије него што буде довољно софистицирана да роботи омогуће да потпуно науче сами, каже Беренсон. Многи постојећи алгоритми машинског учења морају бити унети огромне количине података о могућим исходима - као и сви потенцијални потези у шаховској игри - пре него што могу да започну са најбољим могућим планом напада. У другим случајевима, можда ће им требати стотине, ако не и хиљаде покушаја манипулације одређеним објектом пре него што се спотакну на стратегију која делује.
То ће се морати променити ако се робот креће и комуницира са светом онолико брзо колико људи могу. Уместо тога, каже Беренсон, идеални робот требао би бити у стању да развије нове вештине у само неколико корака користећи покушај и грешку или да буде у могућности да екстраполира нове радње из једног примера.
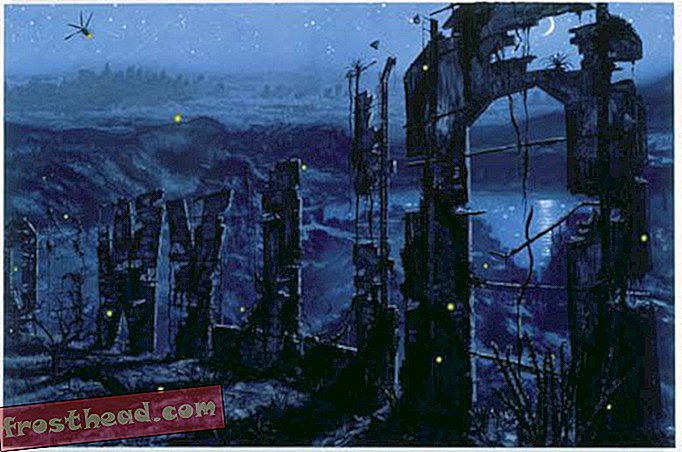
 Аполон, робот којег је конструисала инжењерка Јеаннетте Бохг, покушава да помери цилиндар преко стола, док картонска кутија блокира његов пут. У овом експерименту, истраживач је премештао кутију на нове локације на столу док се рука померала, приморавајући Аполона да поново израчуна свој пут у лету. Збуњена слика у доњем десном углу приказује поглед из Аполонове перспективе, подвлачећи колико је тешко роботу препознати и комуницирати са објектима око њега. (СУДСКИ ЈЕАННЕТТЕ БОХГ)
Аполон, робот којег је конструисала инжењерка Јеаннетте Бохг, покушава да помери цилиндар преко стола, док картонска кутија блокира његов пут. У овом експерименту, истраживач је премештао кутију на нове локације на столу док се рука померала, приморавајући Аполона да поново израчуна свој пут у лету. Збуњена слика у доњем десном углу приказује поглед из Аполонове перспективе, подвлачећи колико је тешко роботу препознати и комуницирати са објектима око њега. (СУДСКИ ЈЕАННЕТТЕ БОХГ) „Велико питање које треба превазићи је како ажурирати моделе робота не са 10 милиона примера, већ једним ?“, Каже он. „Да га пребацим на тачку где пише:„ У реду, ово није функционисало, па шта да радим даље? “ То је право питање учења. "
Масон, роботичар из Царнегие Меллона, се слаже са тим. Изазов програмирања робота да раде оно што радимо безумно, каже он, сажето је нечим што се назива Моравец-ов парадокс (назван по пиониру роботике Хансу Моравецу, који такође предаје у Царнегие Меллон). Укратко, он каже да оно што је људима тешко учинити, роботи често лако управљају, али оно што је друга природа за нас је невероватно тешко програмирати. На пример, рачунар може да игра шах боље од било које особе, али показало се да је препознавање и узимање шаховског дела самостално тешко.
За Масона то и даље звучи тачно. Упркос постепеном напретку који истраживачи постижу на роботским управљачким системима, каже, основни концепт аутономне манипулације можда је један од најтежих матица које поље тек треба да испуца.
"Рационално и свесно размишљање је релативно недавни развој у еволуцији", каже он. „Имамо сву ту менталну машинерију која је током стотина милиона година развила способност да раде невероватне ствари, попут кретања, манипулације, перцепције. Ипак се све те ствари дешавају испод свесног нивоа.
"Можда су ствари о којима мислимо као о вишој когнитивној функцији, попут могућности играња шаха или алгебре - можда су те ствари мртво тривијалне у поређењу с механиком манипулације."
 Кновабле Магазине је независно новинарско настојање из часописа Аннуал Ревиев .
Кновабле Магазине је независно новинарско настојање из часописа Аннуал Ревиев .