Људима је сасвим уобичајено - посебно онима који раде у производњи - везати чвор, скинути кућиште са кабла, уметнути иглу у рупу или користити ручни алат попут бушилице. Они могу изгледати као једноставни задаци, али су заиста веома сложени и укључују изузетно фине покрете прстију и руку.
Сличан садржај
- Како су роботи напустили лабораторију и започели помагање људима
Иако се роботи све више укључују у радове у фабрици и у широком спектру других послова - укључујући услужну индустрију и здравство - њихова спретност није ни приближно импресивна. Будући да су их људи први пут довели на посао у аутомобилским фабрикама пре више од 50 година, направили смо роботе који могу прилично добро заваривати, фарбати и састављати делове. Данашње најбоље роботске руке могу покупити познате предмете и преместити их на друга места - попут узимања производа из канти за смеће и стављања у кутије.
Али роботи не могу правилно да оријентишу ручни алат - рецимо, постављање одвијача главе Пхиллипса са жлебовима на шрафу или циљање чекићем за нокат. И они дефинитивно не могу да употребе две руке на детаљне начине, попут замене батерија на даљинском управљачу.
Људске руке су одличне у тим задацима и још много тога. Да би се чак приближили ривалству за оно што су наше руке лако способне, рукама робота потребна је боља окретност, поузданост и снага - и они морају бити у стању да тачније осећају и крећу се још финије него сада, да схвате шта раде ' задржавање и како то најбоље схватити. Да би роботи могли да раде заједно са људима, мораћемо да смислимо како да направимо роботе који нам могу буквално пружити руку када наша два нису довољна.
Моја истраживачка група на Универзитету Северни Исток ради управо на томе, посебно за хуманоидне роботе попут НАСА-ове Валкирие, која на свакој руци има три прста и палац. Свака цифра има зглобове налик на зглобове, а свака рука има ручни зглоб који се може лако окретати. Радимо на креирању покрета - комбинације покрета руке, зглоба, прста и палца који колективно испуњавају задатак, попут померања кључа у круг за затезање вијака или повлачења колица с једног места на друго.
 Сваки од ових индустријских робота има вишеструко специјализованих алата. Да ли се многи од њихових задатака могу обавити роботским рукама? (Стеве Јурветсон / флицкр, ЦЦ БИ)
Сваки од ових индустријских робота има вишеструко специјализованих алата. Да ли се многи од њихових задатака могу обавити роботским рукама? (Стеве Јурветсон / флицкр, ЦЦ БИ) Важност руку
Уместо да сваког робота направимо прилагођену машину прилагођену специфичном задатку, морамо дизајнирати вишенаменске роботе, или чак такве способне машине да би их могли назвати „опћом наменом“ - добро за готово сваки задатак. Један кључ успеха ових врста робота биће одличне руке.
Наш рад је фокусиран на дизајнирање нове класе прилагодљивих руку робота способних за прецизно прецизно кретање и аутономно хватање. Када роботи буду у стању да се убију за нокте, измене батерије и изврше друге сличне покрете - основне за људе, али веома сложени за роботе - биће нам добро на путу до људског вештина у роботским рукама.
Постизање овог циља укључује и проналазак нових дизајна који укључују тврде и меке елементе - на начин на који људска кост даје снагу за стисак, а кожа шири притисак тако да се чаша вина не разбије.
Бржи развој и тестирање
Савремена технолошка унапређења олакшавају развојни процес. Помоћу 3Д штампања, прототипове можемо направити врло брзо. Чак можемо да направимо и јефтине компоненте за једнократну употребу да бисмо испробали различите механизме механизама, попут двоструких или трокраких хватаљки за једноставне задатке одабира и места или антропоморфних руку робота за осетљивије операције.
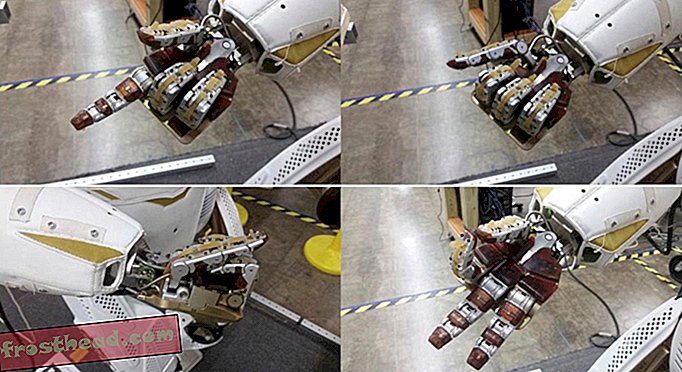 Различите врсте руку на НАСА роботки Валкирие. (Универзитет североисток, ЦЦ БИ-НД)
Различите врсте руку на НАСА роботки Валкирие. (Универзитет североисток, ЦЦ БИ-НД) Како се електронске камере и сензори смањују, ми ћемо их моћи интегрирати на нове начине. На пример, ако у роботску руку ставимо сензоре притиска и фотоапарате, они могу да дају повратне информације контролору робота (било да је људски или аутоматизован) када је квака сигурна или ако нешто почне да клизи. Једног дана можда ће моћи да осете у ком правцу се креће објекат, па га робот може ухватити.
Ове способности су већ друга природа за људе кроз вид и проприоцепцију (способност осећања релативног положаја делова тела без гледања или размишљања о томе). Једном када их будемо успели постићи у роботима, они ће моћи да раде ствари попут откривања да ли је захват прејак и превише стеже предмет.
Планирање координираних покрета
Још једна прекретница биће развијање метода за роботе који ће схватити које покрете требају да ураде у стварном времену, укључујући осећање шта се дешава у њиховим рукама сваког тренутка. Ако рука робота може открити промјене у објектима којима рукује или манипулирати предметима док их држи, они би могли помоћи у оним уобичајеним ручним задацима као што су везање чвора и уклањање жица.
Рад са две руке заједно је још даље у будућности, иако би пружио значајан подстицај, посебно за производњу. Робот који може управљати бушилицом са две руке или преносити делове машине из једне руке у другу била би велика побољшања, која би фабрикама омогућила још више корака у својим процесима.
 Је ли ово робот будућности? (НАСА)
Је ли ово робот будућности? (НАСА) Ми људи још нисмо развили ове системе. Постигнуће људске аутономне спретности робота задржиће истраживаче, технологе и иноваторе роботике у догледној будућности. То неће успорити текућу револуцију роботике у производњи, јер тренутни процеси и даље имају много простора за аутоматизацију за побољшање сигурности, брзине и квалитета. Али како радимо још боље, они ће нам моћи пружити руку.
Овај чланак је првобитно објављен у часопису Тхе Цонверсатион.
Таскин Падир, ванредни професор за електротехнику и рачунарско инжењерство, Универзитет Нортхеастерн